MITミュージアムにてロボット工学のレクチャーを受講しました。
内容は、プログラマブルな車模型を使った実習です。
まず、お掃除ロボット、ルンバの紹介があり、
この動作はルンバが考えているのか?との問いかけ。
いや、人間がどんなときにどんな動作をするか指示を与えておくのだと。
で、それを実現する手段がプログラミングだということで、
この時間は、ブロックプログラミングをやるぞということになりました。

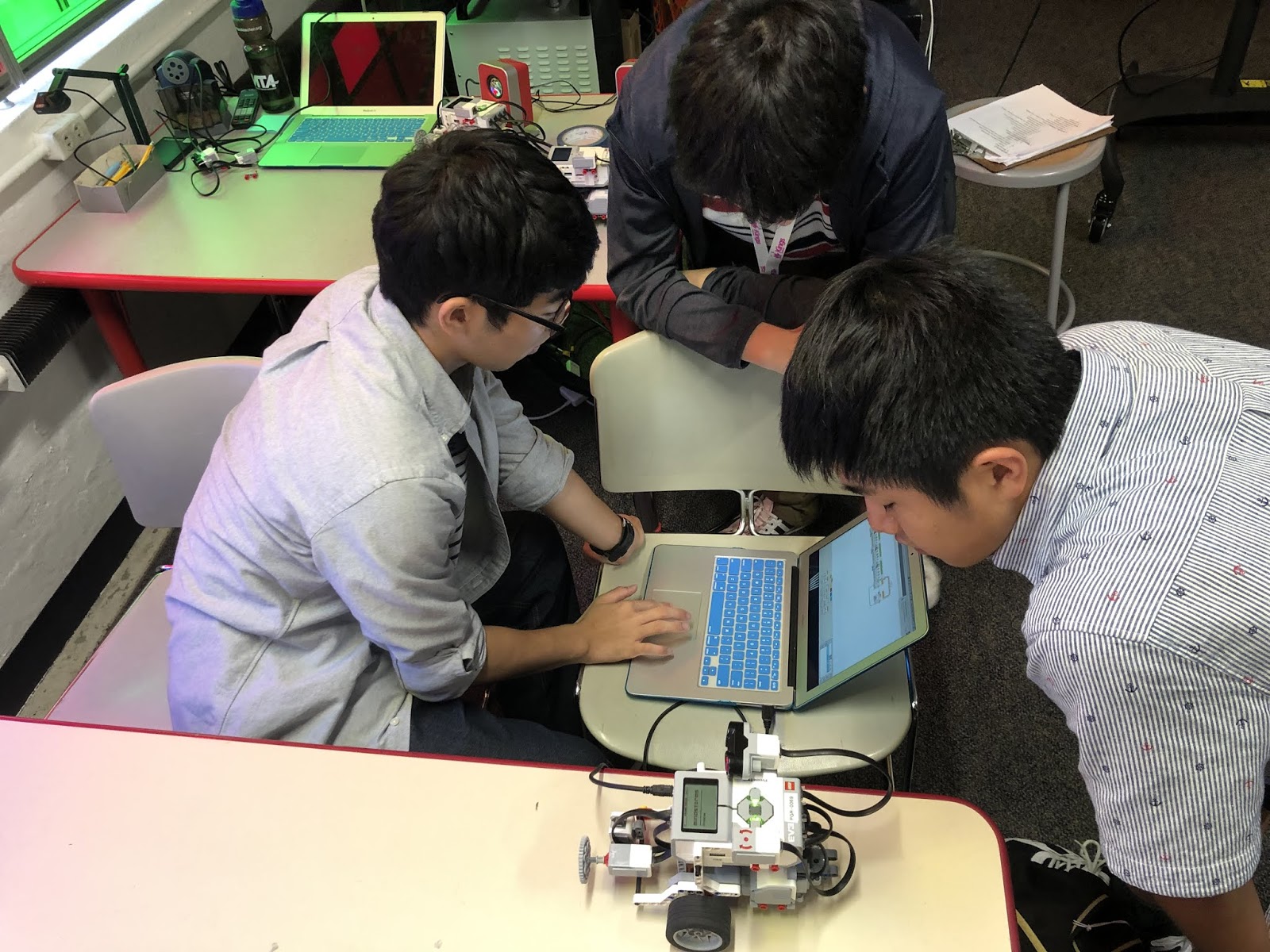
いくつかのセンサーを備えた車型のおもちゃを、パソコンにつないでブロックプログラミングによって指示を与えます。
先生から指令があたえられ、徐々に難しくなっていきます。
・机の一端から前進し、もう一方の端で逆走して戻ってくる。
・机の一端から前進し、もう一方の端で方向を180°転換し、前進して戻ってくる。
・四角形を描くように動く。
・タッチセンサーを使い、障害物に当たった時に向きを変え移動する。
・ライトセンサーを使い、机の端から落ちないように移動する。
などなど
こんなひとつの指令がブロックになっていて、それをつないでいくことで一連の動作をつくります。後半には条件分岐、繰り返しなどの一般のプログラミングでいう制御構文まで教わりました。

生徒たちは思いのほか楽しくて、時間がたつのを忘れて試行錯誤し、思い通りに動かせた時の喜びを体で表現していました。






0 件のコメント:
コメントを投稿